The Challenges of Robotic Perception
What are the primary challenges of robotic perception? The perception challenges we experience as humans are the same types of challenges that robots face when trying to perceive the world. There are many examples of this. To begin with, just as people have trouble seeing in the dark, robots may encounter situations in which their […]
Shield AI Fundamentals: On Perception

What does perception refer to in robotic systems? We’re referring to a robot’s ability to sense the environment around it, process the information that’s coming in from its sensors, and use it in order to perceive the environment, figure out where it is and how it’s operating relative to the environment, and leverage that information […]
Considering Communication in Coordinated Perception
Among multi-robot systems, what is the role of communication in perception? Communication is a consequential consideration within coordinated perception. Fundamentally, when we talk about coordinated perception, we are speaking about multiple robots moving through an environment engaging in perception. Consider the example of a 2-robot system with both robots moving through a building. Perhaps earlier […]
Shield AI Fundamentals: On Knowledge Representation
We’ve spoken extensively about intelligence and learning in artificial systems. Can you elaborate on the concept of knowledge? Within the context of artificial intelligence, knowledge represents everything that the robot needs to know in order to be intelligent. In essence, it represents the overarching logical framework — the concepts and the logical relationships — that […]
Shield AI Fundamentals: On Learning Methods

What is the difference between supervised, semi-supervised and unsupervised learning? Within machine learning there are several types of learning methods. There include: supervised learning, semi-supervised learning and unsupervised learning, as well as reinforcement learning. With supervised learning, you would provide the AI system with example input-to-output pairs of data. From these pairs, the system is […]
What is Coordinated Exploration?

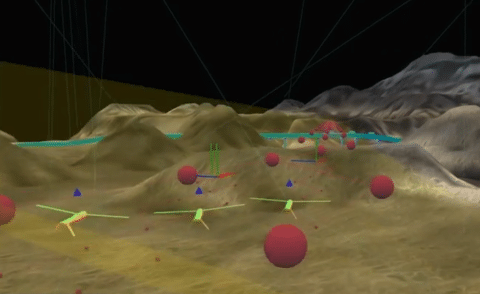
What is coordinated exploration? In the context of Shield AI, coordinated exploration corresponds to the deployment of multi-robot systems in order to explore an environment. These multi-robot systems collectively develop a structural model of that environment by moving through and navigating around it. Coordinated exploration refers to how the robots decide how to move through […]
How Do Robots Learn Through Exploration?

How does learning appear within the context of coordinated exploration? Within the context of exploration, learning emerges the more the system operates. The system improves with operation because the more that it operates, the more experience it acquires about how the actions it takes given the appearance and nature of the environment will impact the […]
How do Robots Communicate with Each Other?
A conversation with Professor Nathan Michael, Shield AI’s Chief Technology Officer. This is a continuation of our conversation about Trust and Robotic Systems. In terms of multi-robot systems, how do we think about coordination in terms of how robots communicate with each other and learn together? When we talk about multi-robot exploration and teams of […]
What is Multi-Robot Exploration?

A conversation with Professor Nathan Michael, Shield AI’s Chief Technology Officer. This is a continuation of our conversation about Trust and Robotic Systems. What do we mean by multi-robot exploration? Exploration for a single robot system in our context considers uncertainty reduction in an unknown environment performed by a single agent. It involves the system […]
How Artificial Intelligence Manifests Through Exploration

A conversation with Professor Nathan Michael, Shield AI’s Chief Technology Officer. This is a continuation of our conversation about Trust and Robotic Systems. In reference to robotic systems, what do we mean by exploration? Typically, when we talk about exploration with an autonomous robotic system for the types of scenarios that we consider, we’re talking […]