[December 20, 2024]
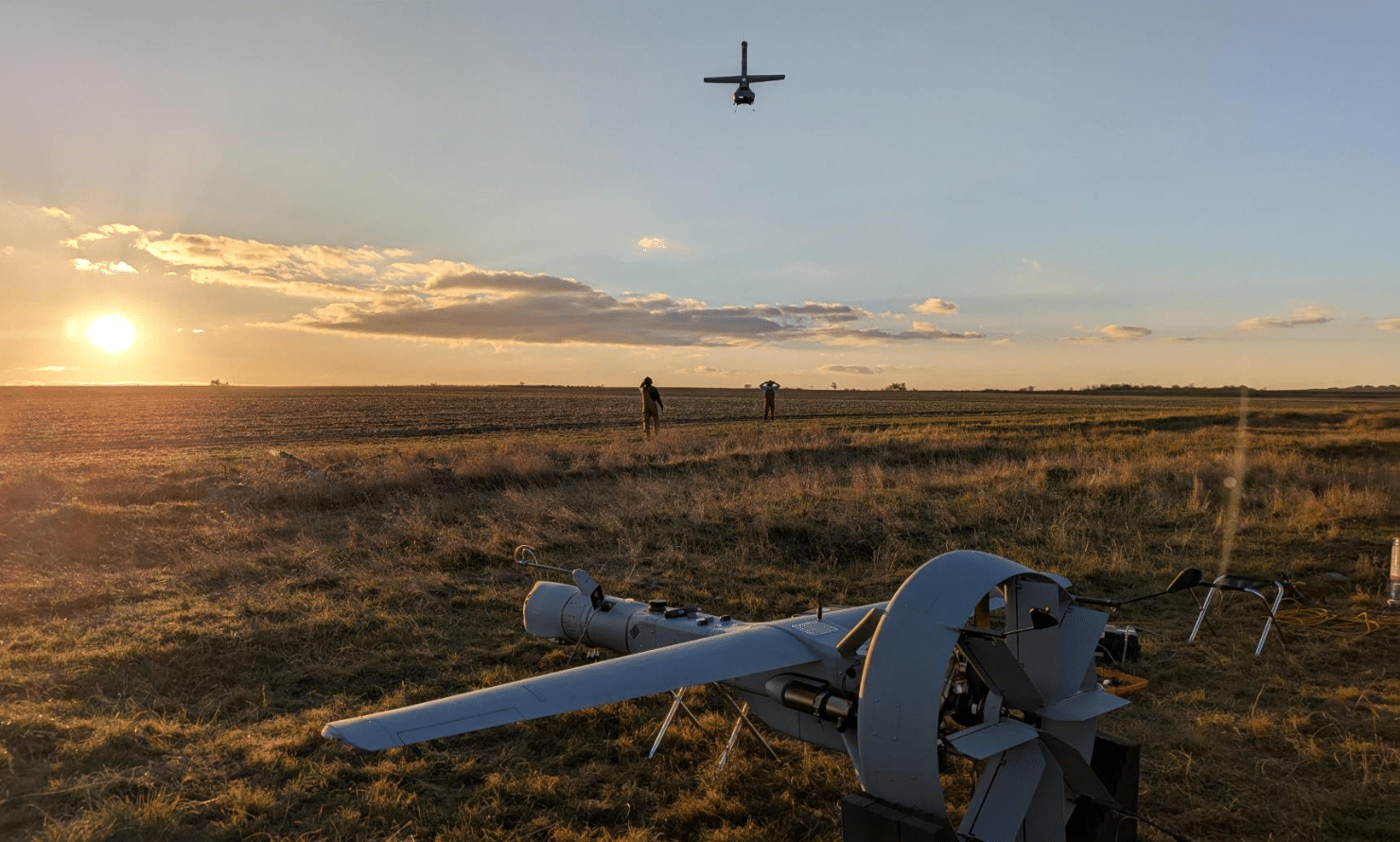
Autonomy for the World: V-BAT
This blog is part of a series of case studies highlighting the unique challenges and accomplishments of integrating Hivemind on each platform it has flown. Each installment delves into the technical innovations, collaborative efforts, and mission successes that define our work and our teams.
The increasing complexity of modern defense environments demands that unmanned aircraft systems (UAS) operate efficiently with minimal human oversight. Currently, UAS operations in the defense industry often require continuous manual input for tasks such as loitering, navigation, and route planning. This places a significant burden on human operators, especially in high-stakes environments where minor errors can compromise mission success. Shield AI aims to revolutionize these operations by enabling autonomy for the V-BAT platform. This technology will allow a single operator to manage up to ten V-BATs simultaneously while empowering the aircraft to dynamically respond to changing mission conditions.
Autonomy in defense must reduce operator workload by enabling UAS to independently manage tasks such as loitering, communication losses, and rerouting. With high-level autonomy, V-BAT can make rapid in-theater adjustments, allowing operators to focus on mission-critical decisions rather than routine controls.
For example, in crowded airspace, operators typically need to make frequent route adjustments to mitigate risks like communication interruptions. These challenges are further compounded by sensor limitations such as restricted field of view or obstructions that affect performance. Autonomy addresses these issues, ensuring efficient and reliable mission execution.

Platform Autonomy: Building a Reliable Foundation
Platform autonomy enables a UAS to operate independently, handling movement, navigation, and fault detection. For the V-BAT, this means executing vertical takeoff and landing (VTOL), avoiding obstacles, and maintaining safe flight paths.
VTOL operations, particularly landing, poses significant challenges under adverse conditions. Even minor errors can result in crashes or mission failure. The complexity of VTOL landings arises from the seamless transition between fixed wing to hover flight, requiring precise adjustments to the vehicle’s state (e.g., heading) while accounting for external disturbances such as wind.
Landing on small surface vessels further complicates this operation, demanding exceptionally accurate maneuvering to safely reach the landing platform. Current development efforts focus on minimizing the time the vehicle spends in vertical hover, where controllability is most limited, especially in high crosswinds. Accelerating the transition from fixed wing to hover and optimizing landing speeds through intelligent trajectory planning improves both the safety and precision of landing operations
To further reduce operational risks, V-BAT autonomously updates its return path during communication losses, minimizing the chance of entering No-Fly Zones (NFZs). This “lost comms” planning ensures the vehicle can follow a safe, predefined route back to base, even without direct operator input.
Ensuring reliability is critical to platform autonomy, especially for systems designed to operate in diverse and demanding environments. For V-BAT, a key challenge is preventing spinning during hover, which can occur in high winds or when descending into its own wake. To address this, V-BAT detects wind direction and aligns its heading accordingly. If spinning persists, the system identifies the issue and increases thrust to clear the wake and stabilize. These advanced measures enhance V-BAT’s autonomy and ensure reliable performance, even under challenging conditions, laying the foundation for mission success.

Mission Autonomy: Enabling Advanced Operational Capabilities
Once platform autonomy is established, mission autonomy elevates UAS capabilities by enabling the pursuit of advanced operational objectives. While platform autonomy focuses on self-management tasks such as takeoff, navigation, and fault recovery, mission autonomy prioritizes achieving operational objectives like identifying targets, conducting surveillance, and coordinating with other agents.
Mission autonomy empowers V-BAT to autonomously identify and track objects or vehicles of interest. This capability is crucial in reconnaissance and search-and-rescue operations, where rapid identification and tracking can significantly influence mission success.
Another cornerstone of mission autonomy is team coordination. The ability to form cohesive, data-sharing teams of autonomous UAS provides operators with a critical advantage, enabling them to manage complex multi-agent missions more efficiently. The ability to form cohesive, data-sharing teams of autonomous UAS enhances operational effectiveness across a wide range of scenarios.
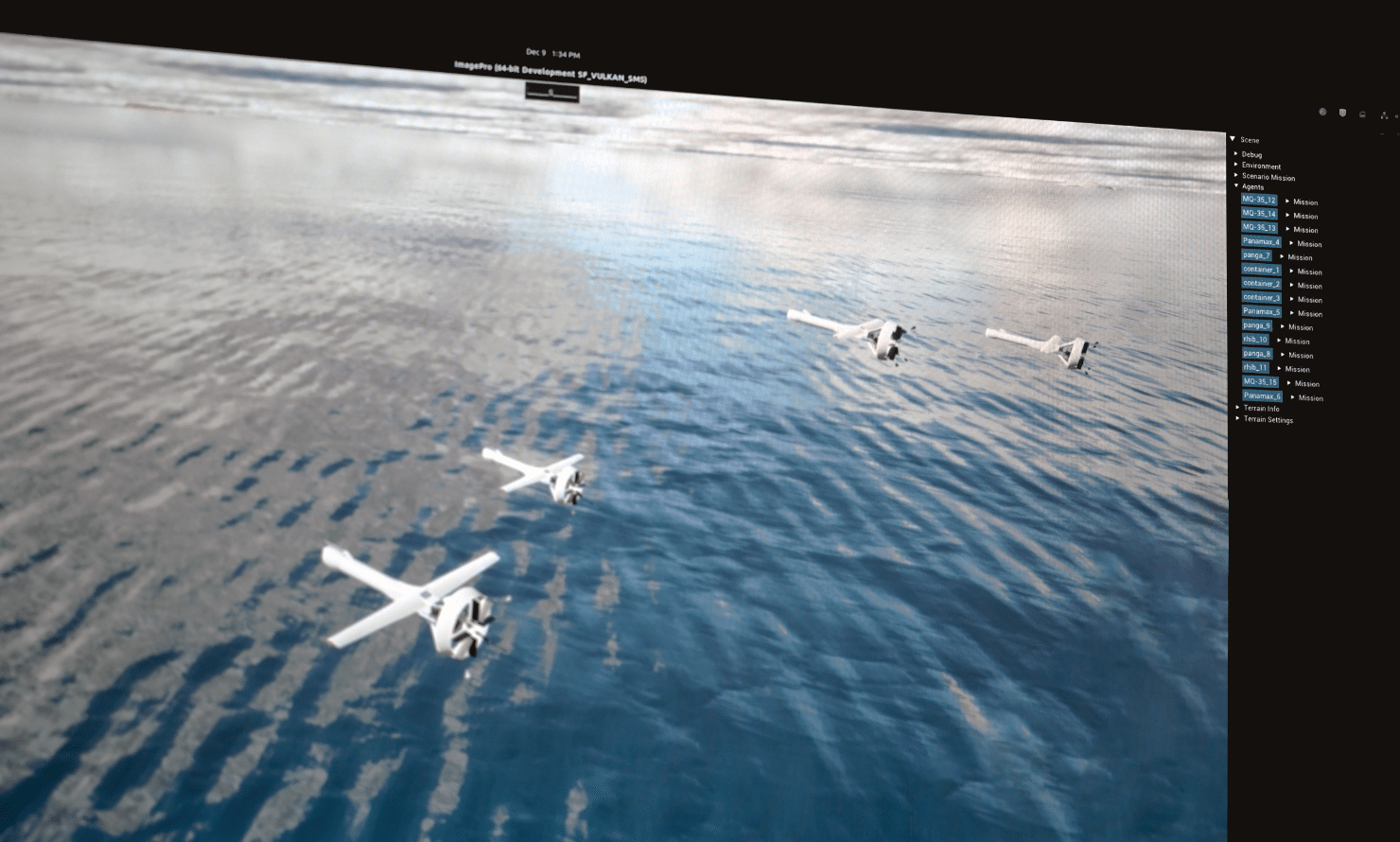
Shield AI has pioneered mission autonomy through simulated demonstrations and real-world testing of multi-agent scenarios, laying the groundwork for V-BAT’s ability to operate as part of coordinated teams. This foundation was developed through simulations and flight tests with Shield AI’s Nova 2 platform. These trials identified the challenges of transitioning from simulation into reliable real-world operations.
One notable prototype with a team of V-BATs involved a coordinated wide-area search for wildfire detection, which informed the development of maritime search simulations using V-BAT. These early successes, built upon lessons learned from Nova 2’s multi-agent flight tests, have provided the team with valuable insights and bolstered confidence in advancing mission autonomy capabilities for V-BAT in complex operations.
Edge Computing and Optimizing for Resource Constraints
A key differentiator in V-BAT’s autonomy is its reliance on edge computing. Unlike systems that rely on external computation resources, V-BAT’s autonomy algorithms operate entirely onboard the aircraft. This design ensures resilience in GPS- and communication-denied environments, enabling mission-critical functions without the need to “call home to a human-in-the-loop” for guidance.
Developing effective edge autonomy algorithms within resource constrained environments is a significant challenge. Edge computing systems must address limitations such as constrained processing power, restricted bandwidth, and the need for real-time decision-making. V-BAT’s autonomy is optimized to balance competing demands for power, weight, payload, and endurance, particularly in environments where communication bandwidth is limited or unavailable.
To overcome these constraints, V-BAT employs innovative approaches to computational efficiency. For example, instead of relying on dense grids for path planning, V-BAT uses visibility graphs to construct efficient routes. While this method minimizes computational overhead, it introduces its own challenges such as when navigating in no-fly zones. To address these issues and ensure safety, V-BAT layers advanced algorithms enhancing its ability to navigate safely and reliably in complex scenarios.
For real-world optimization, V-BAT leverages algorithms based on Dubin’s Path theory, which calculates the shortest route between two points with curvature constraints. This approach enables V-BAT to make efficient pathing decisions in 3D space while adhering to the aircraft’s dynamic limitations. This enables efficient path planning while maintaining robust no-fly zone avoidance.
Dubbin’s path planning is computationally efficient, allowing seamless integration with higher-level algorithms for vehicle routing, graph planning, and coordination. It also complements systems used for obstacle avoidance and trajectory control, creating a reliable edge autonomy framework. This approach ensures missions success in even the most constrained operational environments.

Problem-Solving Process: Fly, Fix, Fly
The development process at Shield AI follows a rapid iteration model called fly-fix-fly. This approach ensures that V-BAT’s autonomy capabilities are rigorously tested, refined, and optimized to meet high-performance standards in real-world scenarios.
The first step in this process is to identify the core problem to solve. For example, recent efforts have focused on designing a landing approach that minimizes time in hover while enabling V-BAT to perform controlled, aggressive landings. To facilitate rapid fly-fix-fly cycles, the architecture for new features is designed for quick adjustments to specific components. For landing, this approach treats each phase—approach, alignment, and touchdown—independently from the motion algorithms that control these phases. This modular approach enables easy tuning and modification of motion algorithms independently during flight test.
In the design phase, engineers identify critical parameters such as descent speed that can be adjust in real-time. These parameters are prioritized to ensure fine-tuning during fly-fix-fly cycles. Engineers can select tools and techniques that best address the problem, prioritizing efficiency and maintainability. For example, path-planning challenges may be tackled using graph-based methods or nonlinear optimization, depending on the operational requirements.
In the case of landing, the team evaluated a range of methods from simple geometric planning to offline trajectory optimizations that can be adapted in real-time. This approach presents trade-offs of computational cost, complexity, and extensibility. For initial landing improvements, the team chose simpler geometric planning to support rapid iteration to allow the system to evolve iteratively. This approach ensures foundational systems are in place for implementing more advanced methods in the future.
Once a solution is implemented, the team tests and iterates rapidly. At Shield AI, this means coding in the morning, running rigorous simulations to validate the solution, and flight-testing in the afternoon. This constant feedback loop allows engineers to observe V-BAT’s performance under varying conditions. The fly-fix-fly process is a crucial step in the process to quickly identify critical challenges. This enables engineering to be directed toward solving high-impact issues and continuous improvement in V-BAT’s autonomy capabilities.
Real-World Reliability: Achieving Robustness at Scale
Robustness is critical for autonomy in real-world military applications where reliability in diverse conditions is typical. For V-BAT, this means designing autonomy algorithms that have consistent, repeatable performance over thousands of flight hours.
A key lesson learned from Shield AI’s Nova 2 project was the importance of adaptability and simplicity in algorithm design. By prioritizing streamlined modular algorithms over complex approaches, Shield AI ensures that V-BAT can operate reliably with minimal debugging or maintenance. This approach enables the system to scale effectively while maintaining operational dependability.
By achieving complexity through layering rather than monolithic algorithms, Shield AI’s algorithms are designed to simply handle complex problems. For example, navigating open and crowded airspace poses a significant challenge. One approach could have been to design a highly complex trajectory generation algorithm that accounts for factors such as object proximity and desired speed, however this would have been difficult to balance and limited the algorithm’s reusability.
Instead, Shield AI developed a minimal trajectory generation algorithm that balances safety (e.g., maintaining safe obstacle distances) and speed. This algorithm was then layered with scaling factors to enable adjustment of vehicle kinematics based on the environment. This approach allows V-BAT to prioritize safety by moving slower near obstacles while accelerating in open spaces for efficiency.
Shield’s approach simplifies the design process and enhances maintainability, scalability, and robustness in dynamic conditions. By focusing on modular, adaptable solutions, V-BAT is equipped to handle complex real-world challenges.
Paving the Way for Scalable Autonomy
V-BAT’s autonomy represents a significant leap forward in defense UAS, reducing operator workload, enhancing mission flexibility, and ensuring greater operational reliability. As Shield AI continues to refine these capabilities, V-BAT’s autonomy will continue to mature to adapt to dynamic real-world applications.
Looking ahead, Shield AI’s goal is to advance mission autonomy, empowering V-BAT’s ability to execute complex tasks and collaborate with other autonomous systems. The continued advancement of V-BAT’s autonomy stands to enhance defense and surveillance operations, enabling precise, reliable performance in complex, contested environments.
Shield AI’s work in autonomous systems is paving the way for a future where intelligent, resilient systems augment human capabilities reducing the need for direct human oversite. By refining these capabilities, V-BAT exemplifies how advanced UAS can extend the reach and effectiveness of critical defense missions.
Dylan Jones is a Staff Autonomy Engineer at Shield AI, where he focuses on advancing autonomous capabilities for the V-BAT platform. Previously, he was a key member of the team that developed the autonomous teaming technology for the Nova quadcopters. Dylan holds a PhD and a master’s degree in Robotics from Oregon State University, as well as a B.S. in Mechanical Engineering from Tufts University. Originally from Portland, he is an avid soccer fan (Go Thorns!) and now resides in Dallas, Texas.
This blog is part of a series of case studies highlighting the unique challenges and accomplishments of integrating Hivemind on each platform it has flown. Each installment delves into the technical innovations, collaborative efforts, and mission successes that define our work and our teams.